BEV
BEV
Ref:
Bird’s Eye View,简称BEV
为什么要使用BEV算法?
我的理解:自动驾驶中不同角度的传感器想要融合,需要在将他们转换到同一个角度,这样才能继续分析,而BEV就将他们都投影到到鸟瞰平面,便于分析。
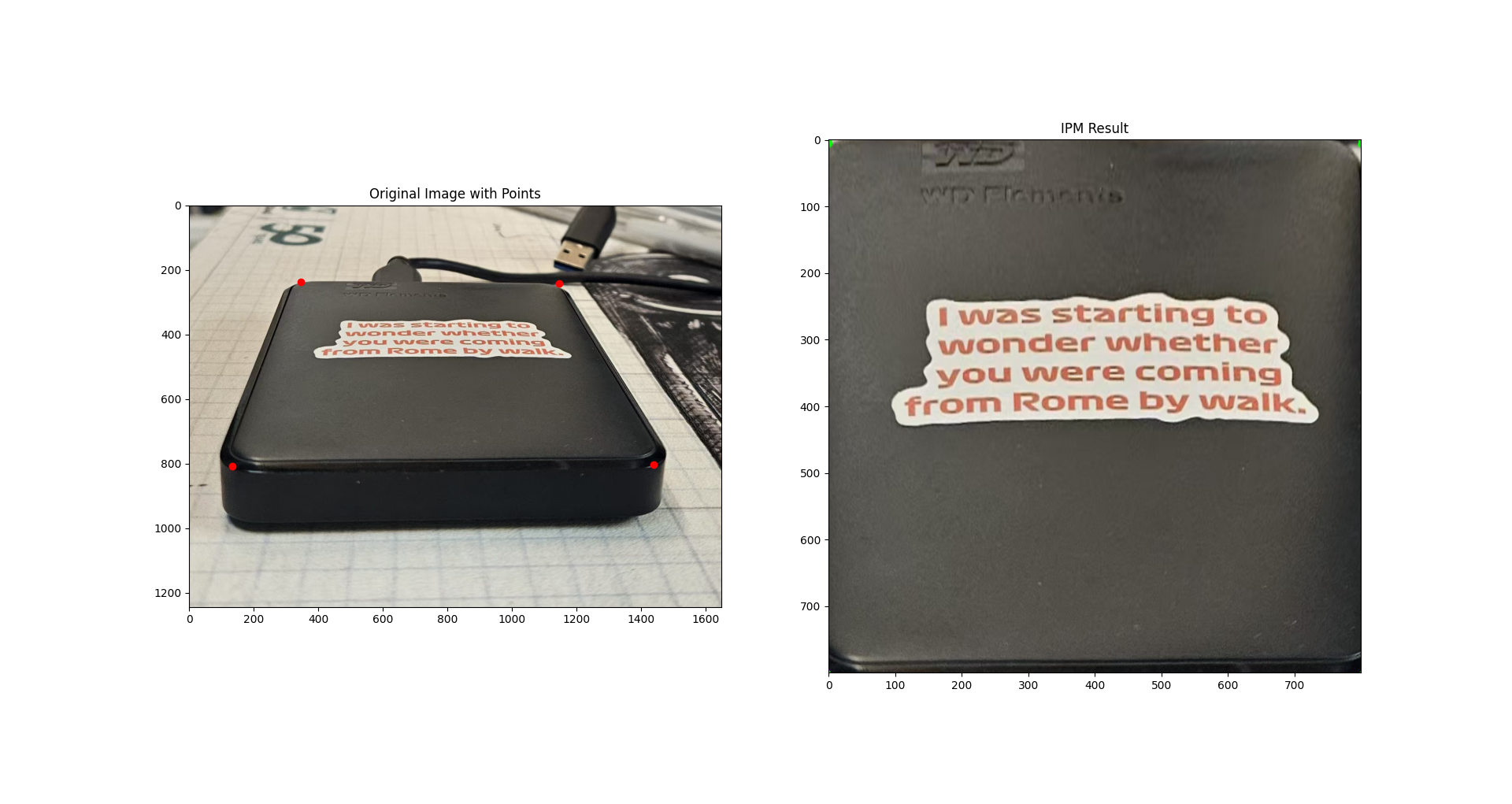
IPM(Inverse Perspective Mapping)
在现实世界本来平行的事物,最终却相交,这正是由于透视效应,而IPM也就是逆透视变换
我用ai生成了一段IPM算法的代码,其通过调用opencv库实现
标注点顺序为:左下、右下、右上、左上
那么,如果地面不平坦,会发生什么呢?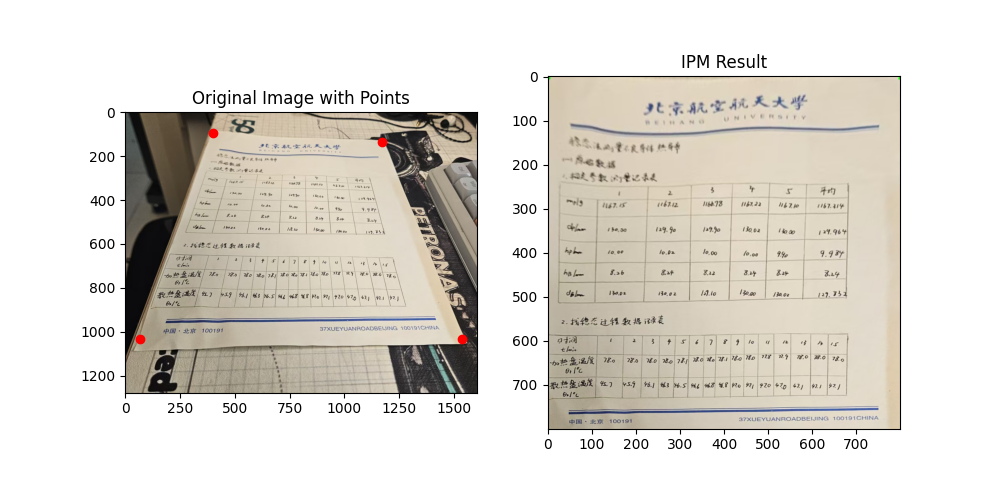
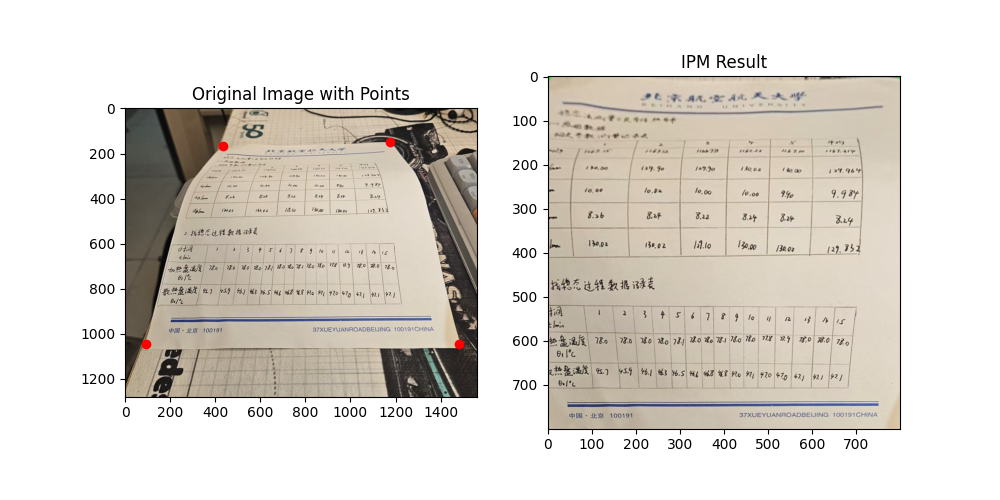
可以发现,当地面有起伏时,IPM有较大的失真,这不难理解,下面我们简单分析一下IPM的算法
1 | #透视变换核心 |
我们可以发现,核心在于矩阵变换,这里我们需要了解相应的数学知识,这一部分包括在github的仓库中,是我手写的pdf版本,你需要了解什么是单应性矩阵,只需要简单掌握概念,其余推导过程和解释都将包括在pdf中。